$Do\ not\ go\ gentle\ into\ that\ good\ night.$
$Rage,\ rage\ against\ the\ dying\ of\ the\ light. $
Shiqi Duan, a student living in Hefei.
个人信息
电子邮箱:sqduan@mail.ustc.edu.cn
籍 贯:山西省太原市
出生年月:1996年1月
研究方向:量子测距与导航定位系统捕获跟踪瞄准装置
教育背景
- 2014.9-2018.7 哈尔滨工业大学 自动化 学士 保送读研
- 2018.9-至今 中国科学技术大学 控制科学与工程 学硕
个人技能
英语技能
- CET-6 (495) 、CET-4 (525),能够熟练阅读和翻译英文资料,具有较强的英文写作能力及良好的口语交流能力。
专业技能
- 熟练使用MATLAB进行编程(卫星运动仿真、量子纠缠光信号仿真及处理、神经网络);
- 熟练使用Simulink进行系统建模与仿真(高精度控制器及滤波器设计及仿真);
- 熟练使用C/C++进行编程(控制算法的C语言实现);
- 熟练使用Qt用户图形界面开发平台(地面站软件设计、3维卫星可视化仿真软件设计、基于VMess协议的代理软件设计);
- 熟悉Python编程(利用TensorFlow搭建串联网络进行图像去雾及目标检测);
- 熟悉常用的数据结构、算法及规范化编程标准;
- 熟悉Linux系统环境,能够进行一定的Linux运维工作(Archlinux、Ubuntu);
- 具有一定的硬件设计及开发基础(基于STM32的控制器、基于NanoPi平台的通信中继器)
知识树
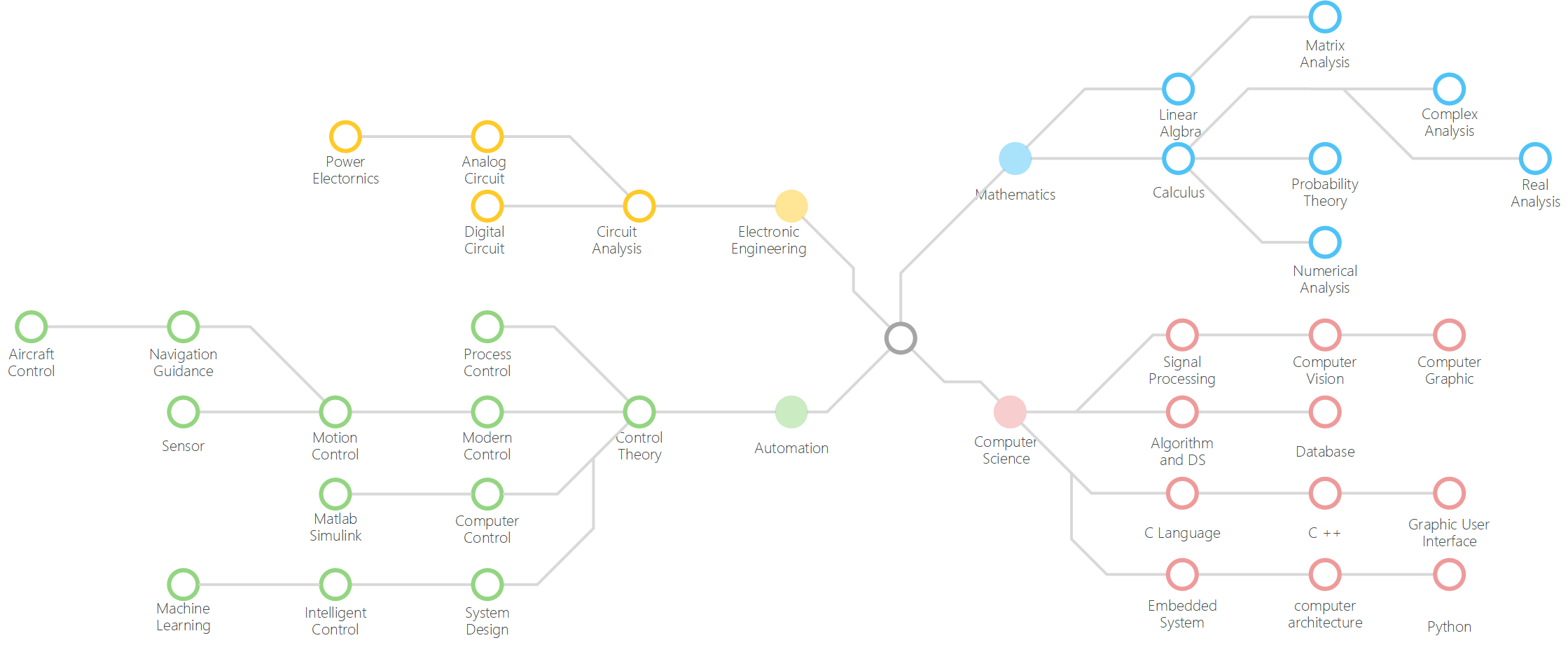
重点技术栈
- 算法与数据结构
- 计算机组成原理
- 操作系统
- 计算机网络
论文及专利
论文
- Duan S, Cong S, Zou Z, et al. Modelling and simulation of the quantum ranging and positioning system[J]. International Journal of Modelling and Simulation, 2019: 1-15.
- Duan S, Cong S, Song Y. A survey on quantum positioning system[J]. International Journal of Modelling and Simulation, 2020: 1-19.
- Shuang Cong, Zisheng Zou, Shiqi Duan, Ding Chen, State Filtering and Nonlinear Control of Fine Tracking System in Quantum Positioning Systems, WSEAS Transactions on Systems and Control, 2019, Volume 14, pp. 264-27.
- 丛爽,段士奇.基于量子卫星“墨子号”的量子测距过程仿真实验研究[J/OL].系统仿真学报:1-13[2020-09-19].http://kns.cnki.net/kcms/detail/11.3092.v.20200528.1152.002.html.
- 段士奇, 丛爽, 邹子盛, 等. 量子导航定位系统中 ATP 子系统的仿真研究[J]. 第二十届中国系统仿真技术及其应用学术年会论文集 (20th CCSSTA 2019), 2019.
- 丛爽, 吴文燊, 段士奇.星基量子定位导航系统的测距、定位与导航[J].导航定位与授时,2019,6(04):50-56.
- Feng N, Jiang T, Duan S, et al. Obtaining Ellipse Common Tangent Line Equations by the Rolling Tangent Line Method[C]//International Conference on Machine Learning and Intelligent Communications. Springer, Cham, 2017: 569-576.
专利
- 丛爽,段士奇,邹紫盛等。基于星基量子卫星的测距与定位系统[P]. 201910559828.3
- 孙明健,段士奇,姜腾等。一种多旋翼无人机的自动充电装置及方法[P]. 201710265155.1
- 孙明健,姜腾,段士奇等。旋翼无人机的光伏充电装置[P]. 201610968954.0
- 孙明健,张筱磊,段士奇等。一种无人机有源噪声控制装置[P]. 201610829089.1
- 孙明健,杜海,黄龙瑞,姜腾,沈敏康,段士奇等。一种分布式架构的集群微服务器系统[P]. 201620444191.5
项目经历
研究生期间
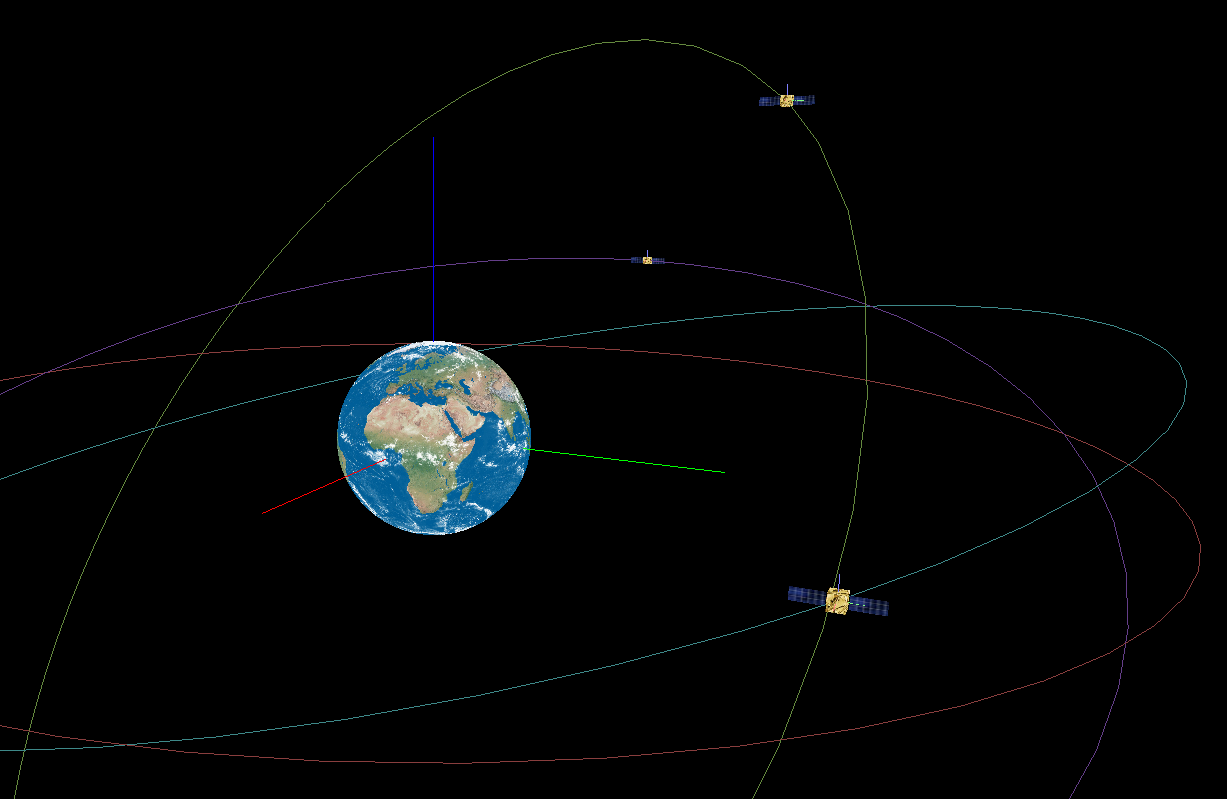
承担天地一体化信息技术国家重点实验室“量子导航定位系统“捕获、跟踪与瞄准系统(Acquisition, tracking and pointing system)设计与仿真研究。具体工作如下:
- 建立卫星轨道参数模型,对LEO量子卫星进行三维运动分析与可见性分析,通过星历表补偿岁差与章动对卫星的影响,从而对卫星一个工作周期内运行状况及可见性进行精确仿真。在此基础上利用Qt+Opengl开放图形库编写了三维卫星仿真软件对卫星进行可视化分析。预留数据接口,可实现与MATLAB、SIMULINK等软件的联合仿真分析。
- 在精确建立量子卫星运动轨迹的基础上,对星地激光通信所使用的ATP系统粗、精跟踪子系统中的二维转台及快速反射镜进行建模,获得了被控对象的数学模型。同时根据被控对象模型确定系统稳态及暂态特性。设计了多种粗、精跟踪嵌套式控制系统,包括PID+卡尔曼滤波、自抗扰控制(ADRC)、线性最优控制及模型参考自适应控制。并对控制器的稳定性及收敛性进行了证明。在此基础上搭建了Simulink系统仿真框图,对控制器性能进行了验证,并选择了控制效果最优的控制策略,仿真结果优于给定性能指标。
- 在实现对ATP系统精确控制的基础上,对纠缠光子对星地大气链路传输过程进行了仿真。对采用二型自发参量下转换实现量子纠缠以及通过符合计数算法实现纠缠光子对到达时间差的过程进行了仿真,获得了皮秒级的到达时间差测量精度,从而实现了高精度的测距过程。