Model predictive control is like playing chess, at ,each time step, you choose the best strategy to win. In this process, you make prediction based on current situation. This article gives out the modelling in MPC
In MPC, models are needed for prediction.
Model requirements
Simple model?
Simple manipulation and algebra requires linear models.
- If these are good enough, use linear models in MPC
Typical linear models including transfer functions and state space model.
Discrete or continuous?
Decision making requires processing time, there for, MPC laws are implemented in discrete time.
What sample rate?
A typical argument is that one wants around 10 sample points within a typical response (settling time or rise time)
Don’t be too slow or too fast!
Slower decision making will reduce the performance.
Faster sampling rate is point less, the system cannot respond to fast input changes because of inertia; meanwhile, it will challenge the optimization process.
Summary
- Operate in discrete time
- Use a sample rate around 1/10 of system dynamic responses (can be modifided if performance is not good enough)
Model form
State space model see state feedback control
Transfer function model
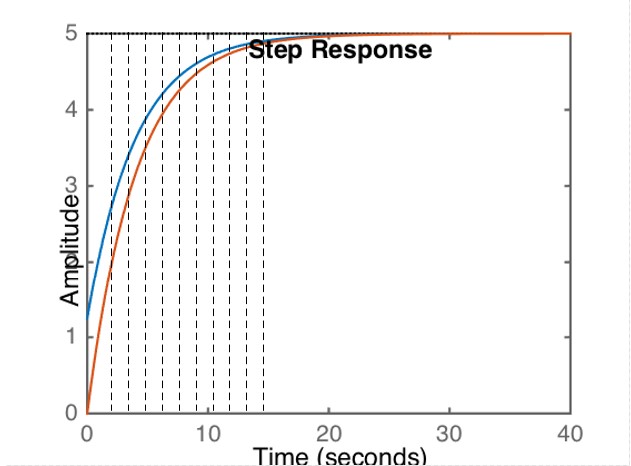
Step response model
- Independent model: The model G can be anything (SS, TF)